
Архитектура ЭВМ
Компоненты ПК
Интерфейсы
Мини блог
Самое читаемое
- Арифметико логическое устройство (АЛУ)
- Страничный механизм в процессорах 386+. Механизм трансляции страниц
- Организация разделов на диске
- Диск Picture CD
- White Book/Super Video CD
- Прямой доступ к памяти, эмуляция ISA DMA (PC/PCI, DDMA)
- Карты PCMCIA: интерфейсы PC Card, CardBus
- Таблица дескрипторов прерываний
- Разъемы процессоров
- Интерфейс Slot A
Ввод-вывод
Программирование контроллера прерываний i8259А
Программирование контроллера прерываний i8259А
- Подробности
- Родительская категория: Ввод-вывод
- Категория: Программирование контроллера прерываний i8259А
Большая популярность применения этой микросхемы в качестве диспетчера аппаратных прерываний в компьютерах на базе микропроцессоров Intel объясняется наличием большого количества различных режимов ее работы, что позволяет сделать подсистему прерываний достаточно гибкой и эффективной. Действительно, если посмотреть на развитие аппаратной части компьютеров, начиная, например, с i8088/8086, то видно, что менялись самые разные компоненты, но подсистема прерываний, основанная на микросхеме i8259А, так и осталась неизменной. Программирование контроллера прерываний осуществляется через адресное пространство ввода-вывода посредством двух 8-битовых портов с адресами 20h и 21h. Управление контроллером осуществляется путем посылки в определенной последовательности в эти порты специальных приказов двух типов: Как вы уже, наверное, успели понять, процесс программирования контроллера жестко регламентирован. Поэтому рассмотрим вначале формат приказов управления, а затем их практическое применение.
В процессе загрузки компьютера и в дальнейшем во время работы контроллер прерываний настраивается на работу в одном из четырех режимов:
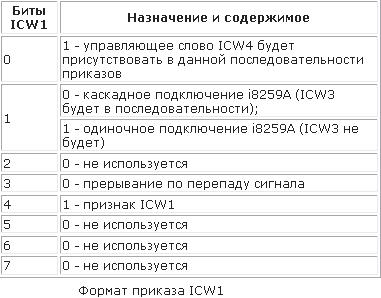
Первое.ICW1 — определить особенности последовательности приказов
- Подробности
- Родительская категория: Ввод-вывод
- Категория: Программирование контроллера прерываний i8259А
Состояние битов этого приказа (табл ниже) определяет особенности в последовательности приказов при инициализации контроллера. Данный приказ посылается в порт 20h.
Второе. ICW2 — определение базового адреса
- Подробности
- Родительская категория: Ввод-вывод
- Категория: Программирование контроллера прерываний i8259А
Настало время прояснить еще один принципиальный момент, до этого времени сознательно замалчиваемый. Он связан с принципом определения числового диапазона адресов векторов прерываний для аппаратных прерываний, замкнутых на контроллер прерываний. В реальном режиме работы микропроцессора для хранения указателей (векторов) на процедуры-обработчики прерываний используется специальная область памяти — таблица векторов прерываний. Эта таблица начинается с нулевого адреса оперативной памяти и занимает 1 Кбайт. Среди векторов есть, конечно, и вектора, указывающие на процедуры-обработчики тех прерываний, которые замкнуты на контроллер. Эти вектора располагаются в таблице последовательно, одной группой, и их нумерация начинается с некоторого номера вектора, называемого базовым. Приказ ICW2 (табл. 15.2) позволяет задать номер этого базового вектора для контроллера прерываний в соответствии с тем номером, который назначен соответствующему вектору в таблице векторов прерываний. В реальном режиме работы микропроцессора BIOS в процессе начальной загрузки системы инициализируется ведущий контроллер значением 08h, а ведомый — значением 70h. Теперь понятно, почему обработчику прерываний от таймера соответствует номер вектора 08h в таблице векторов прерываний, хотя физически он замкнут на уровень 0 контроллера i8259A. При желании мы вполне можем изменить значение базового номера на любой не используемый в системе номер, к примеру — 90h. Также следует учитывать, что некорректная установка нового номера этим приказом может полностью нарушить работу всей системы.
Данный приказ посылается в порт 21h.
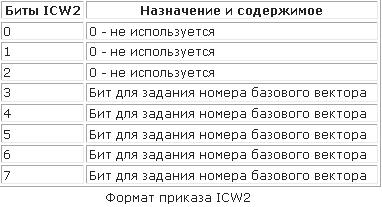
Как видно, для задания номера базового вектора используются биты с 3 по 7 приказа ICW2. Объяснить это можно тем, что на контроллер замыкаются 8 источников прерываний. Выше мы отметили, что номера векторов, соответствующих прерываниям, замкнутых на контроллер, имеют последовательные номера, начиная с базового. Так, для контроллера, инициализированного значением базового номера 08h, номера векторов в таблице векторов прерываний будут 08h, 09h, 0ah, 0bh и т. д. Отсюда и получается, что для задания базового номера биты 0...2 использовать нельзя, так как они применяются для формирования адресов векторов прерываний следующих после базового уровней.
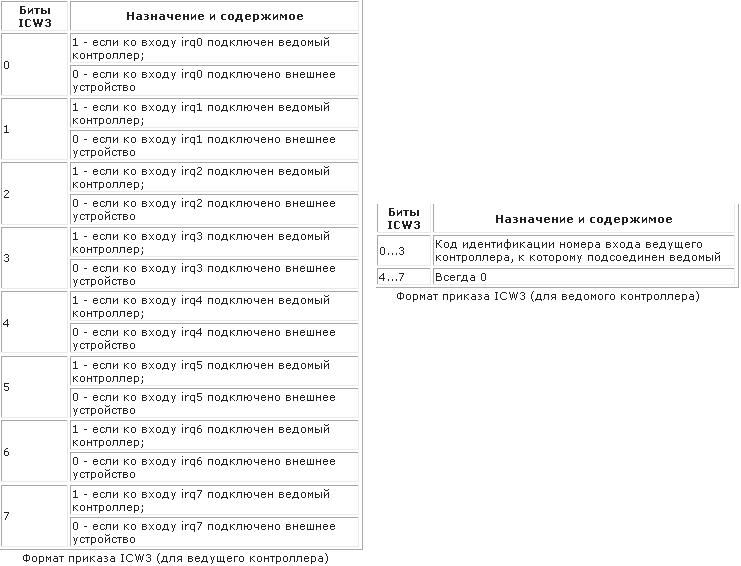
Третье. ICW3 — связь контроллеров
- Подробности
- Родительская категория: Ввод-вывод
- Категория: Программирование контроллера прерываний i8259А
Этот приказ предназначен для связи контроллеров в системе с несколькими контроллерами прерываний.
Вариант работы с одной микросхемой i8259А, позволяющий обрабатывать запросы от 8 источников, использовался в ранних системах на базе микропроцессоров i8088/86 (в архитектуре XT). Но i8259А позволяет организовать так называемое каскадное соединение этих микросхем, при котором выход INT одной микросхемы подается на вход одного из уровней irq другой микросхемы (см. рис. 15.1). Это позволяет организовать обработку запросов от большего числа источников. При этом один контроллер является ведущим, а другой — ведомым (тот, который подключен ко входу irq ведущего). Ниже мы разберемся с каскадированием более подробно. Сейчас отметим, что формат приказа ICW3 зависит от того, какой контроллер инициализируется — ведущий (табл. 15.3) или ведомый (табл. 15.4). При инициализации ведущего контроллера ICW3M сообщает, к каким его входам irq подсоединены ведомые контроллеры. Соответственно, при инициализации ведомого контроллера нужна другая форма этого приказа, которая несет информацию о том, к какому входу ведущего подключен данный ведомый контроллер.
Приказ ICW3 посылается в порт 21h.
Четвёртое. ICW4 — дополнительные особенности обработки прерываний
- Подробности
- Родительская категория: Ввод-вывод
- Категория: Программирование контроллера прерываний i8259А
Этот приказ (см. таблицу ниже) определяет дополнительные особенности обработки прерываний контроллером i8259А. Данный приказ посылается в порт 21h.
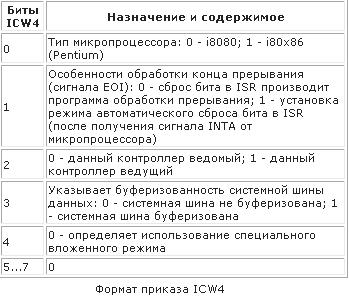
Таким образом, приказы инициализации задают контроллеру режимы работы в условиях вложенных прерываний. Если требуется конкретизировать порядок обработки для отдельных уровней прерываний, необходимо использовать специальные операционные управляющие слова — OCW, назначение и форматы которых мы рассмотрим ниже.