
Архитектура ЭВМ
Компоненты ПК
Интерфейсы
Мини блог
Самое читаемое
- Арифметико логическое устройство (АЛУ)
- Страничный механизм в процессорах 386+. Механизм трансляции страниц
- Организация разделов на диске
- Диск Picture CD
- White Book/Super Video CD
- Прямой доступ к памяти, эмуляция ISA DMA (PC/PCI, DDMA)
- Карты PCMCIA: интерфейсы PC Card, CardBus
- Таблица дескрипторов прерываний
- Разъемы процессоров
- Интерфейс Slot A
Услуга по оперативной печати наклеек на сайте Типографии Альфа.
Процессор
Устройство управления. Микропрограммный автомат
Устройство управления. Микропрограммный автомат
- Подробности
- Родительская категория: Процессор
- Категория: Устройство управления. Микропрограммный автомат
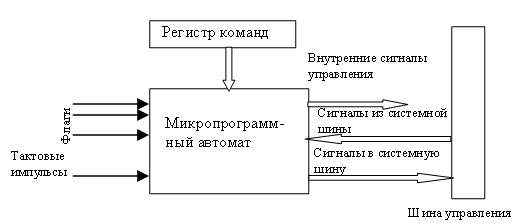
Устройство управления (УУ) ЭВМ реализует функции управления ходом вычислительного процесса, обеспечивая автоматическое выполнение команд программы (см. рисунок). Входной информацией для УУ служат:
- тактовые импульсы — с каждым импульсом УУ выполняет одну или несколько микроопераций;
- код операции — поступает из регистра команды и используется, чтобы определить, какие микроопераций должны выполняться;
- флаги — требуются для оценки состояния процессора, что необходимо для выполнения команд условного перехода;
- сигналы из системной шины — обслуживание прерывания, прямого доступа в память. В свою очередь УУ, а точнее микропрограммный автомат, формирует следующую выходную информацию:
- внутренние сигналы управления — перемещают операнды из регистра в регистр и инициируют работу операционных устройств;
- сигналы в системную шину — управляющие сигналы в память или в устройства ввода-вывода.
Модель устройства управления
Как отмечалось, процесс функционирования ЭВМ состоит из последовательности элементарных действий в ее узлах. Такие элементарные действия, выполняемые в течение одного такта сигналовсинхронизации, называются микрооперациями. Совокупность одновременно выполняемых микроопераций образует микрокоманду.
Последовательность микрокоманд, определяющая порядок реализации машинного цикла, составляет микропрограмму. Микропрограммный автомат определяет микропрограмму как последовательность выполнения микроопераций. В общей структуре УУ можно выделить две части: управляющую и адресную. Управляющая часть предназначена для координирования работы операционного блока, адресной части, основной памяти и др. Адресная часть обеспечивает формирование адресов команд и адресов операндов в основной памяти. Состав управляющей части: регистр команды, микропрограммный автомат, узел прерываний и приоритетов. Микропрограммный автомат на основе декодирования команды вырабатывает определенную последовательность микрокоманд. В зависимости от способа формирования микрокоманд различают микропрограммные автоматы с жесткой и программируемой логикой. Адресная часть УУ включает в себя: операционный узел устройства управления (ОПУУ), регистр адреса, счетчик команд. Регистр адреса используется для хранения исполнительных адресов операндов, а счетчик команд — для выработки и хранения адресов команд. Их содержимое посылаются в регистр адреса основной памяти. ОПУУ обрабатывает адресные части команд, формируя исполнительные адреса операндов, а также подготавливает адрес следующей команды при выполнении команд перехода. Иногда ОПУУ совмещают с основным операционным устройством. Ниже будет рассмотрена схема ОПУУ процессора i8086.
Микропрограммный автомат с жесткой логикой. Микропрограммный автомат с программируемой логикой
- Подробности
- Родительская категория: Процессор
- Категория: Устройство управления. Микропрограммный автомат
Микропрограммный автомат с жесткой логикой
Тип микропрограммного автомата определяет название всего УУ. В микропрограммном автомате с жесткой логикой (см. рисунок ниже) выходные сигналы управления реализуются за счет однажды соединенных логических схем. Микропрограммный автомат с жесткой логикой. Код операций (КОП), хранящийся в регистре команды, используется для определения того, какие сигналы управления и в какой последовательности должны формироваться. При этом, желательно иметь в УУ отдельный логический сигнал для каждого кода операции (IK). Это может быть реализовано с помощью дешифратора.
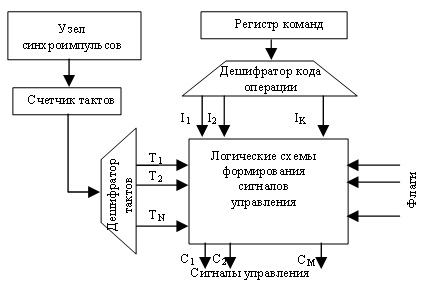
Микропрограммный автомат с жесткой логикой
Сигналы управления, по которым выполняется микрооперация, должны вырабатываться в строго определенные моменты времени, поэтому все сигналы управления "привязаны" к импульсам синхронизации. Счетчик тактов сбрасывается (устанавливается в состояние Т1) по окончании цикла очередной команды. Цикл команды может потребовать разного количества тактов. На каждом такте вырабатывается своя микрокоманда, состоящая из нескольких сигналов управления. Дополнительным фактором, влияющим на выработку сигналов управления, являются флаги.
Микропрограммный автомат с программируемой логикой
Отличительной особенностью микропрограммного автомата с программируемой логикой является наличие памяти микропрограмм. Каждой команде вычислительного устройства в этой памяти соответствует микропрограмма. Идею микропрограммирования сигналов управления предложил в 1951 г. Морис Уилкс (Кембриджский университет, Британия). ЭВМ стала иметь три уровня выполнения команд: между командами и сигналами управления появилась микропрограмма. Команда ЭВМ интерпретировалась в микропрограмму. Аппаратное обеспечение должно было выполнять только микропрограммы с ограниченным набором микрокоманд, отсюда существенно уменьшались аппаратные затраты. К 70-м годам идея о том, что написанная программа сначала должна интерпретироваться микропрограммами, а не выполняться непосредственно электроникой, стала преобладающей. Однако в современных процессорах, когда аппаратные затраты стали менее существенны, отказались от идеи микропрограммирования, так как она стала сдерживать рост производительности. Типичная схема микропрограммного автомата приведена на рисунке ниже.
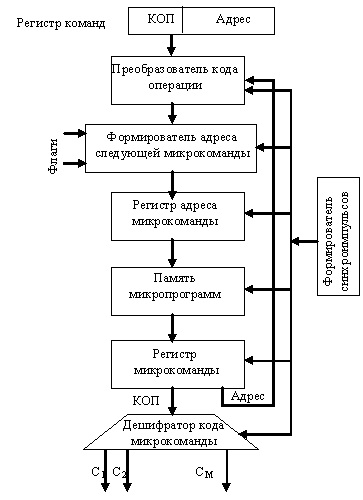
Микропрограммный автомат с программируемой логикой
Запуск микропрограммы выполнения операции осуществляется путем передачи кода операции из регистра команды на вход преобразователя, в котором код операции (КОП) преобразуется в начальный адрес микропрограммы. Выбранная по этому адресу из памяти микропрограмм микрокоманда заносится в регистр. Микрокоманда содержит КОП и адресную часть. КОП поступает на дешифратор и формирует управляющие сигналы, адрес передается для формирования адреса следующей микрокоманды. Этот адрес может зависеть от флагов, КОП, внешних устройств.